On Sunday the 8th Jan, we met physically at our mentor’s house. Viraj and Vighnesh conducted a session for the team members to learn about pull requests. Aditya, Aniket and Dhruv attended the session. Aniket even created a pull request regarding this outreach activity at Progress High School.
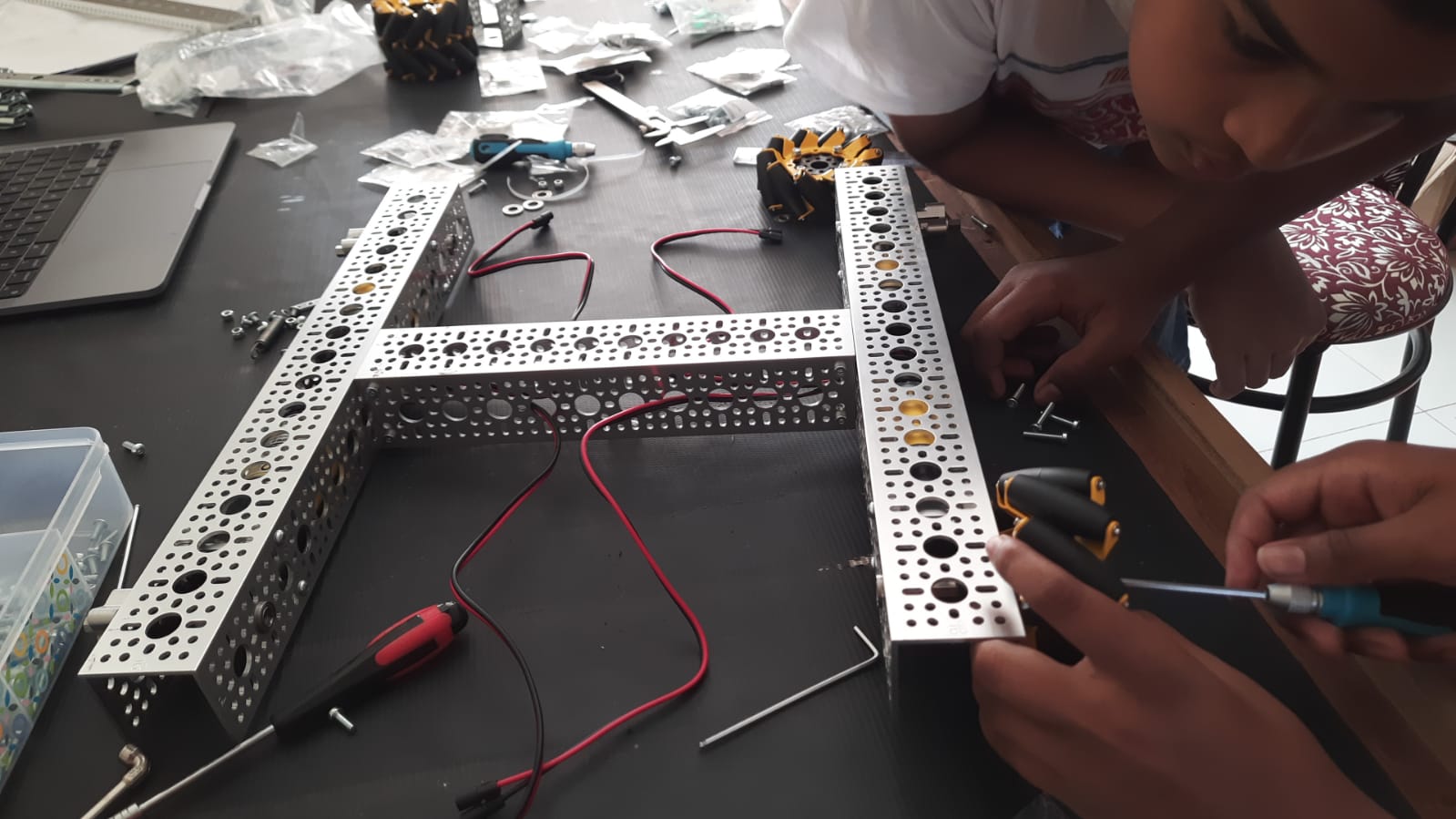
For the first building part of the chassis, the three of us were Sai Pranav, Viraj and Druv. We realised we did not have enough parts to make the strafer chassis last time because we had opened the assembly manual for the strafer chassis v5, but our kit was that of v4. After discovering this issue, we quickly corrected our mistake and opened the right manual for v3. Then we started building it, and after some teamwork struggle, finding the right screw, finding the right parts and a lot of other challenges, we finally managed to complete the strafer chassis.
We first created a simple code that could move the robot linearly. Then we changed the program to move according to the joystick instead of according to a set value. After this, we figured out how to move the robot sideways.
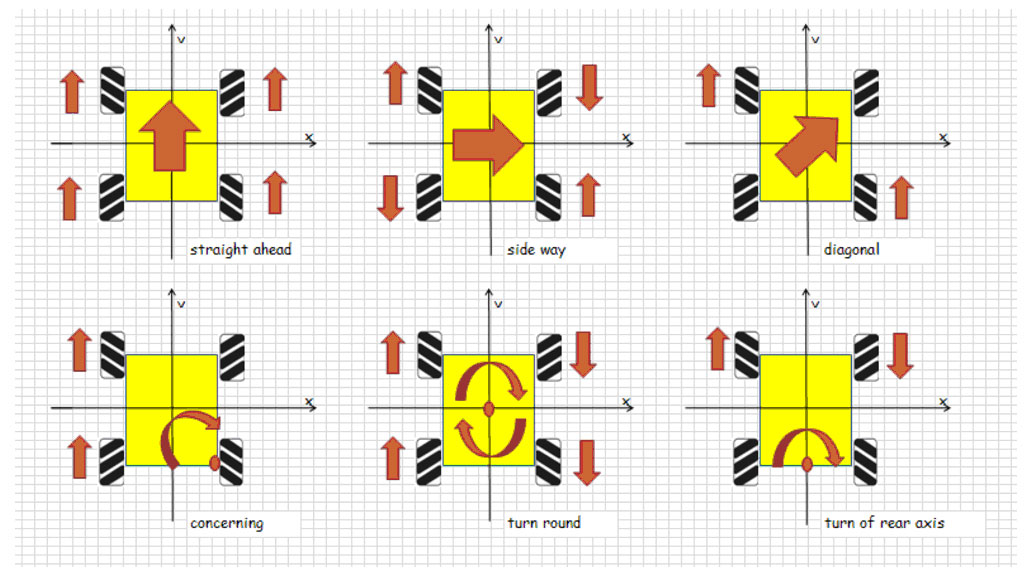
Since our robot uses mecanum wheels, we need to code them differently. The mecanum wheels can move. Like regular wheels, which are forward and backwards and turn left and right, mecanum wheels can move sideways. They can do this by moving the wheels that are diagonal from each other in the same direction. So if we want to move left, the wheels on the left diagonal will move backwards, and the wheels on the correct diagonal will move forward.
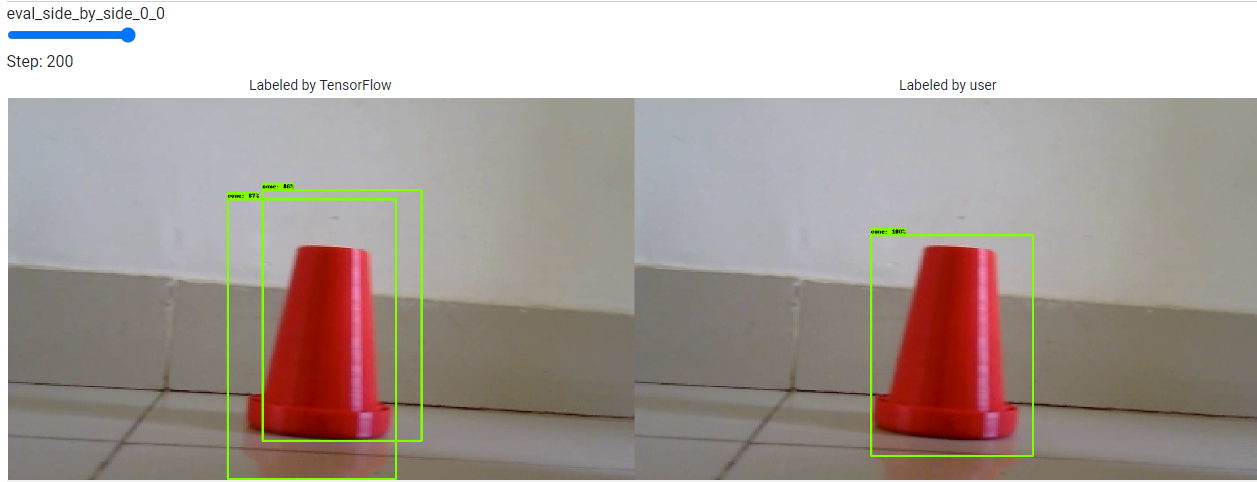
The ML team consisting of Viraj and Vighnesh worked on training the cone model, uploading it as an OP mode, and experimenting with it. We first mounted the camera on the robot and drove the robot in both directions as in to give the feel of what the robot might see in an actual match.
We split up into two teams. One team worked on the slider, and we finished it, including the motor attachment; the only thing left was stringing it.