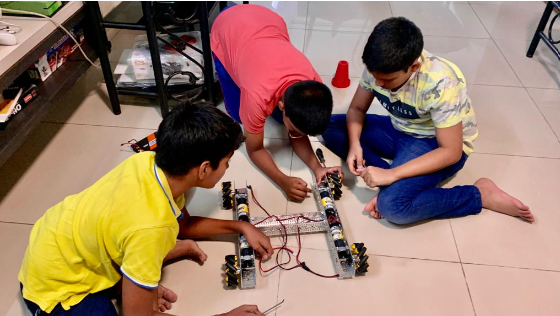
On 10th January, we met physically at our mentor’s house. Venkatesh , Sai Pranav and Avneesh were present.
Venkatesh and Avneesh, were working on fixing the robot. That was tightening the tyres along with the axcel, the bearing and the gears. We did this as the tyres were loose and were shaking and could make the robot unstable. This was a very tedious process. Venkatesh and I failed multiple times before we managed to get it right. We faced a challenge which was that we had only 1 screwdriver and 1 allen key of the appropriate size. So we had to fix the tyres one at a time.
The solution to this problem was that one of us tightened the tyre while one tightened the gears. Also the fact that we had to hold the gear and the tyre tightly along with the axcel the whole time while attaching the screws.
While we were working on tightening the robot tyres, Sai Pranav was working on threading the slider. We made the slider but we had to attach the thread as well as make it function with the motor. So Sai Pranav took the ref. of YouTube and started designing it.
We ended our day by brainstorming how to attach 15mm extrusion to servo motor in order to make a functioning claw.
